

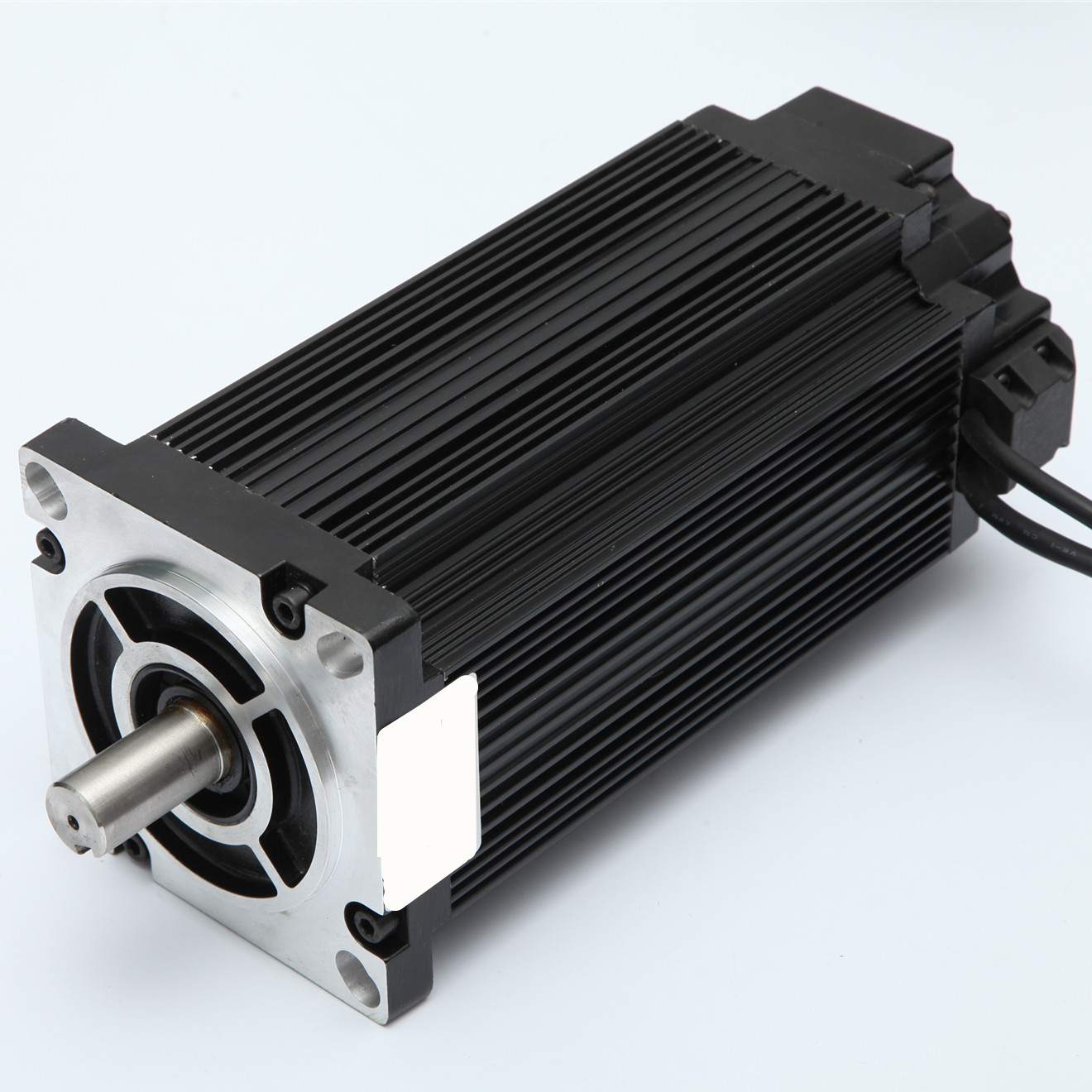
110mm closed loop motor 220V 20Nm malaking torque stepper motor na may led display
NEMA42 Easy Servo Series(NEMA42 Closed Loop series)
Mga Parameter ng Motor Eelctrical:
| Mode | Hakbang anggulo | Kasalukuyang (A) | Paglaban (Ω±10%) | Inductance (mH±20%) | May hawak na metalikang kuwintas (Nm) | Haba ng motor(mm) | Encoder Resolution(PPR) | Naaangkop na Driver |
| 110HCE12N-B39 | 1.2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1.2° | 4.2 | 1.88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
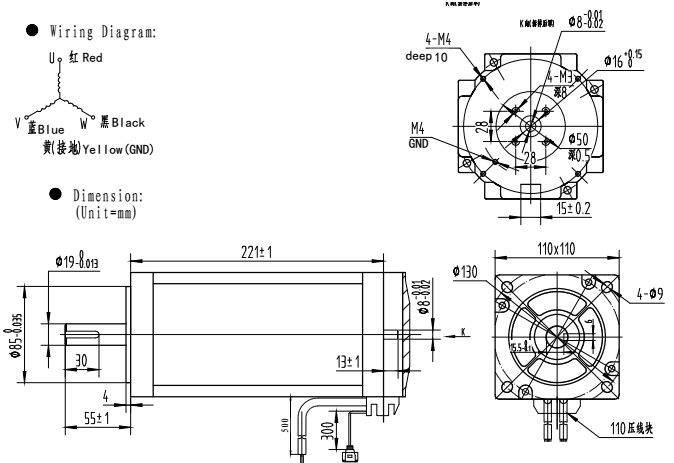
Dimensyon ng motor: mm
Driver 3HSS2260
Mga tampok
1, 32-bit DSP at vector closed-loop control technology
2, Nang hindi nawawala ang hakbang, mataas na katumpakan sa posisyon
3, Pagbutihin ang motor output metalikang kuwintas at bilis ng pagtatrabaho
4, Variable kasalukuyang control teknolohiya, pigilan ang pagtaas ng temperatura ng motor
5, Iangkop sa iba't ibang kondisyon ng mekanikal na pagkarga (kabilang ang mga low-rigidity pulley), hindi
kailangang ayusin ang parameter ng pakinabang
6, Makinis at maaasahang paglipat, mababang panginginig ng boses, mahusay na pagpapabuti sa bilis at
magbawas ng bilis
7, Ang kakayahan ng zero bilis static na walang vibration
8, Iangkop sa 3-phase 86(NEMA34) at 110(NEMA 42) hybrid servo motor
9, Maximum na step-pulse frequency 200KHZ
10, Micro step 400-60000 pulse/rev
11, Saklaw ng boltahe AC150-240V
12, Over current, over voltage at over position na proteksyon
13, Anim na digital tube display, madaling itakda ang mga parameter at subaybayan ang pagtakbo ng motor
estado
Pagpili ng Microstep:
| Code | Kahulugan | Saklaw | Default na Halaga | Puna |
| PA0 | Numero ng Bersyon | 501 | Ipinagbabawal na Baguhin | |
| PA1 | Pagpili ng Control Mode | 0~2 | 0 | |
| PA2 | Pagpili ng Uri ng Motor | 0~2 | 0 | |
| PA3 | Power On Display | 0~7 | 0 | |
| PA4 | Kasalukuyang Loop Kp | 0~1000 | 200 | Ipinagbabawal na Baguhin |
| PA5 | Kasalukuyang Loop Ki | 0~1000 | 300 | Ipinagbabawal na Baguhin |
| PA6 | Posisyon Loop Kp | 0~1000 | 300 | |
| PA7 | Setting ng Micro Steps | 400~60000 | 4000 | |
| PA8 | Encoder Resolution(1000) | 4000 | Ipinagbabawal na Baguhin | |
| PA9 | Encoder Resolution(1000) | 40~30000 | 1000 | |
| PA10 | Hinahawakan ang Current | 10~100 | 40 | |
| PA11 | Closed Loop Current | 10~100 | 100 | |
| PA12 | Pagpapareserba | |||
| PA13 | Pagpapareserba | |||
| PA14 | Paganahin ang Antas | 0/1 | 0 | |
| PA15 | Antas ng Alarm | 0/1 | 0 | |
| PA16 | Pagpili ng Pulse Mode | 0/1 | 0 | |
| PA17 | Pulse Edge | 0/1 | 0 | |
| PA18 | Direksyon ng Pag-ikot ng Motor | 0/1 | 0 | |
| PA19 | Bilis ng JOG | 1~200 | 60 | |
| PA20 | Seksyon ng PEND Mode | 0/1 | 0 | |
| PA21 | Antas ng PEND | 0/1 | 0 |
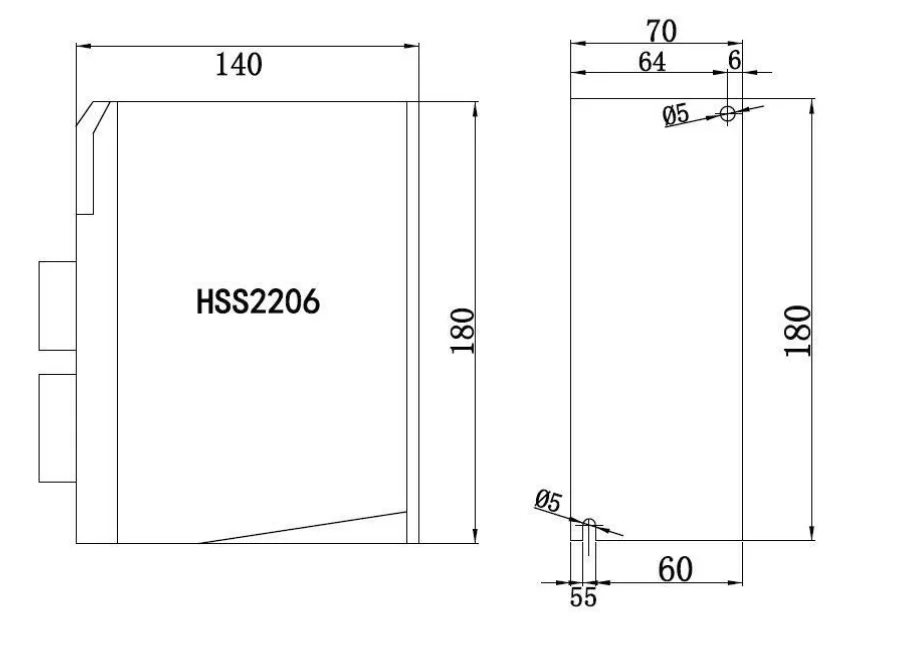
Dimensyon ng driver (mm):
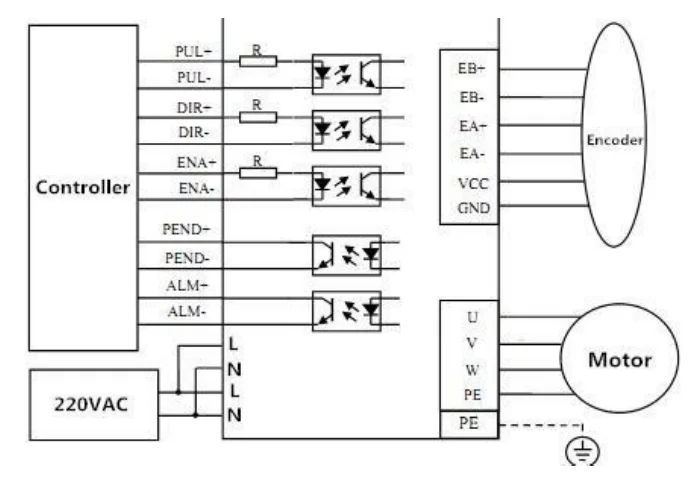
Wiring Diagram:



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
